减少摩擦被动磁轴承创新设计
黄旭东
摘要:摩擦在旋转机器中主要是不需要的。为了减少对系统的影响,磁轴承的集成通常被认为是有效的解决方案。在诸如飞轮储能系统(FESS)的旋转系统中,机械轴承产生的机械损耗大大降低了整体性能。因此,磁性轴承经常集成在FESS中以消除机械损耗。被动磁轴承(PMB)的简单设计,其固有的安全性和极低的摩擦力使其成为FESS的理想选择。本文的主要目标是记录一个创新的PMB,以最小化由轴向推力轴承引起的能量损失,并记录用于测量其刚度和阻尼的方法。
关键词:磁轴承;被动;磁铁表征
1 设计目标
图1显示了设计的轴承的结构。为了减少由该推力轴承引入的机械摩擦,提出有利地使用径向PMB的轴向排斥来减小推力轴承的球上的有效力。因此,本文的主要目的是记录径向PMB的原始设计,允许人们控制稳定转子所需的推力轴承上的载荷。可以通过相对于转子改变定子的位置来控制负载。
为了促进PMB在系统中的集成,必须知道磁性轴承的机械性能,即刚度和阻尼以及其运行极限。已经提出方程来预测不同类型的PMB的性质。然而,这些方程将提供刚度,因为所有部件都是完美的构造和磁化的,情况并非如此。实验装置和磁化模式的缺陷通常会导致测量值偏离理论值。几乎所有这些方法都使用单轴测力传感器测量在单个方向上产生的力,这导致不完整的表征。还应该指出,有些文献中提出的测量技术通常只是简要描述,难以复制。虽然记录的实验测量是准确的,但它们需要大量的操作,常常使表征变得严酷。

图1 使用轴向PMB和机械推力轴承的被动轴承配置
为了回应缺乏记录的实验方法,本文还提出了一种新技术,允许人们在有限数量的试验中完全表征任何类型的磁性轴承。该方法在表征新设计的PMB时进行了测试和验证。所提出的技术也可以用于主动和超导体轴承(分别为AMB和SMB)和更复杂的永磁体阵列,例如锥形阵列或径向和轴向磁体的组合。
2 轴承和表征方法的设计
2.1 磁轴承的设计
本文研究的径向轴承采用环形钕磁铁(NdFeB)开发。每个轴承使用Yonnet等人提出的配置。这种布置通过放置两个同心磁体来实现,使得排斥反作用力将使磁体相对于彼此居中。图2a示出了转子磁体(内部)和定子磁体(外部)的定位。此外,已经证明,可以通过堆叠具有交替极点的许多磁体来修改全局磁场并增加产生的力。图2b示出了四对磁体的堆叠。在实验装置中应用4层和5层磁体结构。
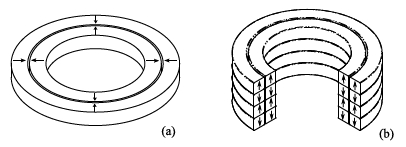
图2 (a)一对同心的环形磁体彼此排斥并且(b)堆叠磁体的取向以增加径向PMB的刚度(箭头表示磁场的取向;反对的箭头表示排斥)
图3显示了使用FEA模型计算的这种类型的组件产生的磁场。为了磁体(a)的完美对准,可以看出,磁体组件径向相互斥力但不垂直相互作用(气隙中的所有磁通线平行于PMB轴向)。由于该位置不稳定,图3b显示当定子向轴向移动时会发生什么。在这些构造中,转子仍然居中,但是存在产生的垂直力,其推动转子远离(气隙中的通量线都是轴向和径向定向的)。这种现象在本文提出的新设计中尤其重要,因为产生的垂直力用于减小推力轴承的负载(参见图5中的碳化钨球)。

图3 由PMB为轴对称FEA模型获得的不同轴向位置产生的磁通线(中心线表示每个阵列的左侧)
(a)用于转子和定子的完美轴向对准的磁通线;
(b)引入部件的轴向未对准时的磁通线。
许多机械部件必须设计成将磁体组件固定在一起受到高排斥力。每个轴承的转子和定子由磁铁座,环形磁铁,隔板和定制螺母组成。图4显示了两个组件的剖视图,详细说明了每个组件。
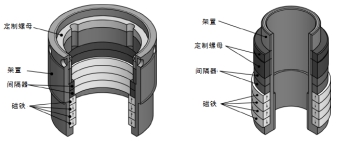
图4 定子(左)和转子(右)的剖视图
转子和定子的安装座的尺寸设计使得它们可以接受2至6个磁体来增加或减小力。转子安装座被设计成确保转子和定子的磁体即使在添加其他磁体时对准。所有组件均采用铝合金6061-T6制造,具有良好的机械和非磁性能。大多数部件也被设计成在单一操作中制造,以减少几何误差。除了磁体外,所有部件均实现了严格的公差,这些磁体是由供应商制造的,质量控制无可用信息。它们是定制的,方形截面为6.35毫米。Baden等人提出1的高度/长度比表示优化所产生的力的良好设计。转子的磁体的内径为38.1mm,定子的磁体的内径为52.2mm。因此,磁铁之间的径向气隙为0.7mm。使用本文“计算”部分中详述的理论方程对磁体的尺寸进行了设计。
对于转子,具有相反磁化的磁体插入到安装座上。专门设计的螺母用于移动磁铁,直到它们相互碰撞。使用相同的程序来组装定子。使用高斯计测量每个磁体的磁化强度,并使用有限元软件进行计算。结果表明,磁体按照标准的MMPA No. 0100-00具有N33级。
轴承组件还包括推力轴承,其由碳化钨钨球(Ø= 6.35mm)和M7工具钢表面组成。球位于转子的末端,工具钢表面集成到轴承的底座上。正确润滑后,推力轴承的摩擦系数约为0.1。
为了安全起见,实现了另一种机械轴承。径向球轴承用于防止转子与PMB定子之间的接触。轴与球轴承的内圈之间的间隙设定为0.45mm。应该注意的是,虽然强制性地使用推力轴承与PMB,但它并没有包括在表征中,以避免其对结果的影响。图5显示允许转子安全运动的主要部件:PMB,推力轴承和用于安全的球轴承。

图5 显示用于安全操作的轴承的简化剖视图(转子和定子分别显示为深灰色和浅灰色)
图5还示出了用于改变由径向PMB产生的轴向位置的装置。定子由部分螺纹套筒和专门设计的锁紧螺母引导并锁定就位。由于转子总是位于同一位置,所以通过降低PMB的定子可以减小施加在推力轴承上的力。套管每英寸有16个螺纹,以便具有相对小的垂直位移(1.59mm),用于定子的完全旋转。最后,将称重传感器放置在推力轴承的钢表面下方以测量施加到其上的力。
2.2 计算
解析方程在文献提出来计算从一个或多个同心对环形永久磁铁而构成的无源磁轴承的径向刚度,如示于图2等。用等式(1)来确定两个同心环形磁体相互排斥的径向刚度。

这个方程的参数为磁体的磁体的磁化,真空磁导率,所述磁体的平均半径,磁铁之间的间隙,宽度和高度。用堆叠磁体构建的轴承的径向刚度可以用等式(2)近似。
这些方程式被用于设计一低摩擦PMB提供足够的刚度,即足够高以径向约束转子,但不能太高,以确保第一和第二机械临界速度将保持在低的值。通过这样的策略,临界速度将在加速阶段快速通过到FESS的标称运行速度。应该注意的是,计算刚度仅适用于转子和定子的磁体垂直完美对齐的情况,如图2b所示。表1包含由不同数量的磁体对组成的轴承计算的径向刚度。
表1 磁体相对的无源磁轴承(PMB)的理论刚度
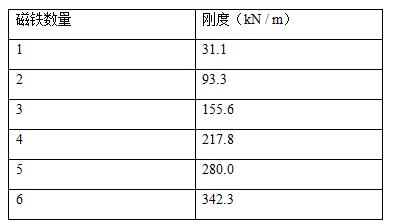
给出这些理论值与实验结果进行比较。根据Earnshaw定理,可以预期径向轴承的轴向刚度为负并且比其径向刚度高两倍。被动磁轴承的典型不稳定性也得到了Morales等人的证实。
3 结论
本文中描述的新型PMB通过使用永磁体磁场的固有特性成功地降低了滑动轴承上的力,从而降低了接触引起的摩擦力。在保持轴承的功能的同时实现摩擦减小。
此外,所提出的实验表征方法代表了一种快速测量磁轴承的轴向和径向刚度的有效方法。也可以通过对实验装置的微小修改来测量其阻尼。测量的刚度低于文献中提出的关于这种轴承类型的方程式获得的理论值。这种差异是重要的,因为轴承的刚度极大地影响了系统的动力学。因此,在将其用于实际系统之前,必须对轴承进行表征。
投稿邮箱:chuanbeiol@163.com 详情请访问川北在线:http://www.guangyuanol.cn/